Bosch Forschung

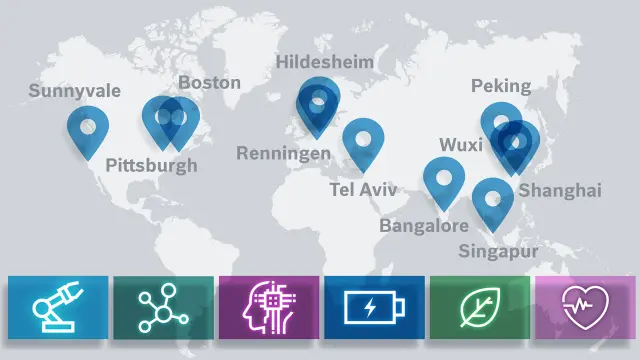
Bei Bosch Research trifft Forschung auf Anwendung. Weltweit entwickeln rund 1 650 Fachleute die Technologien von morgen – und übermorgen.
Die Welt, in der wir leben, verändert sich rasant. Globale Megatrends wie Klimawandel und Digitalisierung beeinflussen nahezu jeden Bereich des täglichen Lebens. Was sich nicht ändert, ist der Anspruch von Bosch, „Technik fürs Leben” zu schaffen – also durch technologische Innovationen die Lebensqualität der Menschen zu verbessern und verantwortungsvoll mit natürlichen Ressourcen umzugehen.
Bosch Research versteht sich dabei als Speerspitze der Innovation bei Bosch: An etwa einem Viertel der von Bosch angemeldeten Patente sind unsere Forscherinnen und Forscher beteiligt. Wir unterstützen einerseits alle Bosch-Geschäftsbereiche bei der Entwicklung der nächsten oder übernächsten Generation ihrer Produkte, andererseits richten wir den Blick weit in die Zukunft: Mit unseren Partnern in Wissenschaft und Industrie identifizieren wir Technologien und Trends, die unser Leben künftig prägen werden, und machen sie für das gesamte Unternehmen nutzbar. Als globales Team mit rund 1 650 Fachleuten aus aller Welt decken wir mit unseren Forschungsfeldern ein breites Spektrum an Themen ab. Ob Automatisierung, Digitalisierung und Vernetzung, Künstliche Intelligenz (KI), Elektrifizierung, Klimaschutz und Nachhaltigkeit oder Healthcare: Bosch Research verbindet Spitzenforschung mit konkreter Technologieentwicklung.






Forschungsschwerpunkte
Bei Bosch Research gestalten wir die Zukunft aktiv mit, indem wir nachhaltige Technologien erforschen und entwickeln, die das Leben der Menschen verbessern und die Wirtschaft effizienter machen. Unsere 1 650 Forscherinnen und Forscher schlagen die Brücke zwischen Wissenschaft und Industrie und erforschen Technologien und Trends in den Bereichen Automatisierung, Vernetzung und Digitalisierung, Künstliche Intelligenz, Elektrifizierung, Klimaschutz und Nachhaltigkeit sowie Healthcare.









Kontakt
Treten Sie mit uns in Kontakt und erfahren Sie mehr über unsere Spitzenforschung und die Möglichkeiten der Zusammenarbeit.

Kontakt Fachpresse
Dora Constantinita
Senior Manager Unternehmenskommunikation, Bosch Research
+49(711)811-8791
dora.constantinita@de.bosch.com
Kontakt Personalabteilung
Sarah Schneck
Human Resources Business Partner, Bosch Research
+49(9352)18-8527
Sarah.Schneck@de.bosch.com