Gemeinsam unterwegs: LUKAS macht den Verkehr in der Stadt effizienter und sicherer
Automatisierte Fahrzeuge werden den Straßenverkehr zukünftig noch sicherer machen. Dass dies schon heute im Mischverkehr mit nichtautomatisierten Gefährten gelingt, hat ein Projektteam von Bosch Research unter Beweis gestellt: durch zuverlässige Kommunikation zwischen den Teilnehmenden sowie mit der Infrastruktur mit Hilfe eines Simulationsmodells – basierend auf künstlicher Intelligenz und erprobt an einer realen Kreuzung.
Rechts gucken, links gucken, Blinker setzen – das sind nur einige Manöver, die eine Fahrerin oder ein Fahrer beachten muss, soll der mobile Untersatz sicher über eine Kreuzung gebracht werden. Im Blick behalten werden müssen Verkehrsschilder, andere entgegenkommende oder abbiegende Fahrzeuge oder gar deren regelwidriges Verhalten. Hinzu kommen Verkehrsteilnehmende ohne Auto wie Radfahrende oder Menschen auf Rollern und Motorrädern. Passanten, spielende Kinder und nicht angeleinte Hunde können ebenfalls Teil einer Kreuzungssituation werden. Und was ist, wenn die Sicht des Fahrenden durch ein Gebäude eingeschränkt ist, also ein Verdeckungseffekt entsteht? Ein wahrer Kosmos voller Kollisions- und Unfallmöglichkeiten.
Geplante Vernetzung: Zusammenarbeit für optimierten Mischverkehr
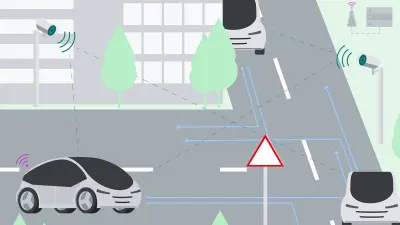
Automatisiertes Fahren kann den Straßenverkehr zukünftig sicherer und effizienter machen. Dies geschieht unter anderem durch das Erheben und Analysieren von verfügbaren Daten, beispielsweise von Infrastruktursensoren, vernetzten Personen- und Nutzfahrzeugen und auch von mobilen Geräten wie Smartphones von Fußgängern oder Radfahrern. Die gesammelten Informationen der verschiedenen Perspektiven können nun insbesondere bei komplexen Verkehrssituationen unterstützen und beispielsweise Verdeckungseffekte auflösen. Das Geschehen, das durch das Auge des Fahrenden oder durch eine Kamera nicht eingefangen wird, kann aufgelöst und sichere Manöver für alle Verkehrsteilnehmenden geplant werden. Es geht dabei insbesondere darum, dass die Verkehrsteilnehmenden miteinander interagieren und kooperieren, ob sie nun automatisiert, teilautomatisiert oder analog unterwegs sind.
„In einem Mischverkehr ist es ineffizient, wenn jeder Verkehrsteilnehmende seine Fahrt nur zum eigenen Vorteil optimiert“, sagt Dr. Benjamin Völz, Forschungsingenieur bei Bosch Research. Er ergänzt: „Eine mögliche Lösung ist die kooperative Verhaltensplanung, die den Verkehrsfluss optimiert.“ Von 2020 bis Ende 2023 hatte Benjamin Völz für genau diese Erprobung die inhaltliche Forschungsleitung für das Projekt LUKAS inne. Das Akronym des Projekts steht hierbei für „L okales U mfeldmodell für das k ooperative, a utomatisierte Fahren in komplexen Verkehrss ituationen“. Die Idee: Auf einem sogenannten Edge-Server, der direkt an das 5G-Netz der Kreuzungsumgebung angeschlossen ist, laufen die Daten und Informationen zusammen, die durch die Sensorik der vernetzten Verkehrsteilnehmenden und die Kameras sowie Sensoren der Infrastruktur erhoben werden. Dort berechnet dieser unter anderem mit Methoden der künstlichen Intelligenz ein optimiertes, kooperatives Fahrmanöver und übermittelt Handlungsanweisungen an die vernetzten Fahrzeuge.

Benjamin Völz und sein Team erforschten in einem Zeitraum von drei Jahren gemeinsam mit den Universitäten Ulm und Duisburg-Essen sowie den weiteren Partnern InMach, IT-Designers, Mercedes Benz und Nokia, im Rahmen des Projekts LUKAS, wie Effizienz und Sicherheit im Mischverkehr verbessert werden können. Das Gestalten und Anlernen der Algorithmen auf dem Edge-Server, der als zentrale Instanz für die kooperative Verhaltensplanung dient, war die Forschungsleistung von Bosch Research im Projekt. Gefördert wurde LUKAS vom Bundesministerium für Wirtschaft und Klimaschutz im Rahmen des Fachprogramms für neue Fahrzeug- und Systemtechnologien.
Real umgesetzt: Testfahrten an der Kreuzung
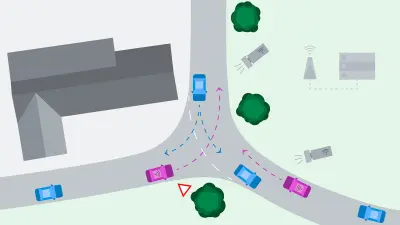
Die Forschenden verbrachten für das Projekt viel Zeit mit Testfahrten an einer realen Kreuzung mit realen Fahrzeugen und Infrastruktur in Ulm-Lehr. Das Besondere dieser Straßensituation: Ringsherum stehen Häuser, welche die Sicht auf die Vorfahrtstraße je nach Position des Fahrzeugs teilweise oder ganz verdecken. Diese Anordnung mit resultierendem Verdeckungseffekt machte diese Kreuzung zu einem idealen Szenario für die Erprobung. Die umliegende Infrastruktur, wie Laternenmaste, wird von der Universität Ulm betrieben. In einem gemeinsamen Vorgängerprojekt wurde die Versuchsanordnung in Ulm-Lehr bereits mit Kamera und Laserscannern zur Datenerfassung aufgebaut. Speziell für LUKAS steuerte Bosch dann Radarsensoren für die Kreuzungs-Infrastruktur bei, genauer gesagt: Radare der fünften Generation von Bosch Automotive.
Auf dieser Kreuzung agierten für den Versuchsablauf nun mit Sensoren ausgestattete automatisierte Fahrzeuge mit solchen, die keinerlei Digitaltechnik an Bord haben. Da es sich um eine Situation im realen Straßenverkehr handelt, werden alle automatisierten Testfahrzeuge mit menschlichen Sicherheitsfahrern betrieben, die eingreifen könnten, wenn digital etwas schief ginge. Nicht-vernetzte Fahrzeuge können, anders als die automatisierten und vernetzten Fahrzeuge, keine Informationen an die vernetzte Umgebung senden. Diese müssen daher durch die Sensoren aus der unmittelbaren Umgebung lokalisiert werden. Die Aufzeichnung erfolgt durch Laternenmasten an der Kreuzung, die mit Video-, Lidar- und Radarsensoren ausgestattet sind, um den laufenden Verkehr zu detektieren und zu klassifizieren.
Zentral gesteuert: mit künstlicher Intelligenz zur kooperativen Verkehrsplanung
Die Sensoren erfassen beispielsweise die GPS-Position der Fahrzeuge sowie deren Geschwindigkeit und liefern die Daten in die vernetzte, virtuelle Umgebung. Diese Objektinformationen – Personen und Fahrzeuge sind aus Datenschutzgründen nicht identifizierbar – werden anschließend über das 5G-Netz an den Edge-Server gesendet und für eine sogenannte kooperative Verkehrsplanung in der virtuellen Welt analysiert.
Dafür hatte das Bosch Research-Projektteam ein Simulationsmodell entwickelt, in dem die realen Verkehrssituationen nachgebildet werden können. Das Team setzte dafür ein lernbasiertes Verfahren der künstlichen Intelligenz ein, das sogenannte Reinforcement Learning als Teilgebiet des Machine Learning . „Wir mussten über das klassische Imitation Learning bei künstlicher Intelligenz hinausgehen“, sagt Benjamin Völz, „da es beim optimalen Verkehrsfluss eben auch mal sein kann, dass ein Fahrzeug auf seine Vorfahrt verzichten muss.“ Da bringe das Imitation Learning (deutsch: Nachahmungslernen), bei dem der Mensch ein Verhalten demonstriert und die Maschine dieses so gut wie möglich nachbildet, nicht viel. Es gibt schlicht keine Aufnahmen davon, wie Menschen freiwillig ihre Vorfahrt aufgeben und dabei ein verkehrstechnisch effizientes kooperatives Manöver entsteht. Insbesondere, wenn man sich in Erinnerung ruft, dass die Fahrzeuge sich auf Grund von Verdeckungen teilweise gar nicht sehen können.
- Das Simulationsmodell wurde mit einem Feedbacksignal und einem Rewardmodell angelernt. Das digitale System wird also bestraft, wenn ein berechnetes Manöver in der Simulation mit einer Kollision enden würde – dann gibt es „Minuspunkte“. Klappt es reibungslos, wird es belohnt und erhält „Pluspunkte“, so zum Beispiel, wenn sichere Abstände zu den anderen Verkehrsteilnehmenden eingehalten werden. Das System vergleicht dabei stets mehrere Möglichkeiten miteinander und versucht, durch Maximierung der Punktzahl die bestmögliche Lösung für alle Teilnehmenden zu finden.
- Das Reinforcement Learning besteht aus zwei Komponenten: Der „Aktor“ entscheidet, was zu tun ist. Der „Kritiker“ bewertet das Ergebnis durch Errechnung des Rewards. Während des Trainings wird das Verhalten des Aktors so lange angepasst, bis der Kritiker keine Beschwerden mehr vorbringt. „Das System nähert sich der kooperativen Situation zum Wohle des optimierten Verkehrsflusses in den Berechnungen an, da es grundsätzlich immer mehrere Lösungen für eine Situation gibt“, sagt Benjamin Völz.
- Das Reinforcement Learning geschieht über ein künstliches, neuronales Netz namens Graph Neural Network (GNN), das wie Synapsen im menschlichen Gehirn aufgebaut ist und auch so funktioniert: Die Funktionsweise der Synapsen wird durch Matrizen abstrahiert. Durch die Kombination multipler Matrizen in einem neuronalen Netz können komplexere Entscheidungen getroffen werden. Auf der Basis der von den Sensoren empfangenen Daten sendet der Server Manöver an die automatisierten Fahrzeuge.
Graph Neural Network
Im LUKAS-Projekt nutzten die Forschenden ein sogenanntes Graph Neural Network (GNN). Der Graph besteht dabei aus sogenannten Kanten und Knoten. Im Projekt werden die Fahrzeuge als Knoten abgebildet, während die möglichen Interaktionen als Kanten dargestellt werden. Entsprechend verbindet eine Kante (mögliche Interaktion) immer exakt zwei Knoten (Fahrzeuge) und ermöglicht die Abbildung von möglichen Konflikten sowie relativen Messgrößen (wie beispielsweise dem kollisionsrelevanten Abstand). Schlussendlich lernt das Netzwerk Handlungsempfehlungen für jedes einzelne Fahrzeug. Die Anzahl der Kanten und Knoten im GNN ist nicht limitiert und kann zur Laufzeit beliebig verändert werden. Diese variable Größe war im LUKAS-Projekt ein Vorteil, da damit beliebig komplexe Verkehrsszenarien abgebildet werden konnten. Andere Netzwerkarchitekturen wie etwa Convolutional Neural Networks (CNNs), die Rasterbilder fester Größe enthalten (sogenannte Grids), sind dafür in der Regel zu unflexibel.
Jedes Manöver enthält abstrakte Handlungsanweisungen. Beispielsweise empfiehlt der Server auf Grundlage der gesammelten Informationen über die Situation, in fünf Sekunden mit einer Geschwindigkeit von 30 km/h in die Kreuzung einzufahren. Zur Absicherung des Gesamtsystems und der Verkehrsteilnehmenden verschickt der Server die Informationen zyklisch, auch ohne dass sich das konkrete Manöver geändert hat. „Dadurch bestätigt der Server, dass er sozusagen am Leben ist und das Manöver immer noch als durchführbar einstuft“, sagt Benjamin Völz. Die Fahrzeuge überprüfen das Manöver und bestätigen die Umsetzung. Auch wenn das System auf dem Server errechnet, dass ein Manöver erforderlich wird, beispielsweise um eine Kollision zu vermeiden, und die Information an die Fahrzeuge sendet, ist immer eine Reaktion notwendig. Wenn auch nur eines der Vehikel das Manöver nicht bestätigt, es entweder ablehnt oder keine Reaktion zeigt, wird das Manöver nicht ausgelöst.
Das Laden des Videos setzt Ihre Zustimmung voraus. Wenn Sie durch Klick auf das Play-Symbol zustimmen, lädt das Video und es werden Daten an Google übertragen sowie Informationen durch Google auf Ihrem Gerät abgerufen und gespeichert. Google kann diese Daten bzw. Informationen gegebenenfalls mit bereits vorhandenen Daten verknüpfen.
Mission erfüllt: Kooperative Verkehrsplanung ist technisch möglich
„Mit dem Projekt konnte dargestellt werden, dass kooperative Planung im Mischverkehr technisch möglich ist“, sagt Benjamin Völz. Gerade mit dem Simulationsmodell in Kombination mit den reproduzierbaren Testfahrten an der realen Kreuzung haben er und sein Team von Bosch Research wesentlich zu diesem Projektergebnis beigetragen. Im aktuellen Versuchsaufbau waren andere Verkehrsteilnehmende wie etwa Fahrradfahrende noch nicht integriert. Aber sie wurden durch die Fahrzeug- und Infrastruktursensoren bereits erkannt. Zukünftig könnten sie also, ebenso wie etwa Fußgänger mit ins Netz eingeloggtem Smartphone, in die kooperative Verkehrsplanung integriert werden. Auf der Grundlage der erfolgreichen Ergebnisse des Projekts sind Vorausentwicklungen der Bosch-Geschäftsbereiche geplant, um die kooperative Verkehrsplanung ausweiten zu können. Beispielsweise gibt es Überlegungen, wie diese auch ohne die Infrastruktursensorik gelingt, die zwar an Kreuzungen möglich ist, aber flächendeckend im Straßenverkehr nicht gewährleistet werden kann. Die Grundlagen für noch mehr Fahrsicherheit im Mischverkehr sind gelegt.
Profil

Benjamin Völz
Benjamin Völz erwarb sein Diplom an der Fakultät für Elektrotechnik und Informatik der Technischen Universität Dresden und promovierte am Institut für Maschinenbau und Verfahrenstechnik der ETH Zürich. Er ist Forschungsingenieur bei Bosch Research und beschäftigt sich mit der Planung des automatisierten Fahrens in Städten. Seine Forschungsinteressen umfassen Szenenanalyse, Vorhersage, Entscheidungsfindung und Planung für automatisierte Fahrzeuge.


