Fahrerassistenzsysteme unterstützt durch künstliche Intelligenz: der nächste Schritt in Richtung automatisiertes Fahren

Die Umgebung wahrnehmen, Distanzen schätzen – dies sind ebenso wie die Objekterkennung vertraute Dinge für uns. Wir nehmen unsere Umwelt durch verschiedene Quellen wahr – allen voran durch das visuelle System. Das visuelle Verständnis der Welt erleichtert den Menschen damit Vieles. Doch wie sieht es mit einem visuellen Verständnis von Computern aus? Und was bedeutet das für automatisiertes Fahren?
Zahlen sprechen eine deutliche Sprache. 2019 sank die Zahl der tödlichen Unfälle im 1. Halbjahr im Vergleich zum Vorjahr – die Tendenz für das restliche Jahr steht noch aus. Dennoch lässt sich aus den bisherigen Ergebnissen eine positive Bilanz ableiten. Kontinuierlich wird der Straßenverkehr sicherer – auch dank einer voranschreitenden Technik. Welche Chancen stecken in der Verbreitung und wie kann man Fahrer noch besser unterstützen? Hier bietet sich die Technologie des automatisierten Fahrens an. Diese besitzt das Potenzial, Fahren und Sicherheit weiter auszubauen und so die seltenen, schweren, durch Menschen verursachten Unfälle weiter zu reduzieren oder zu verhindern.
Eine Frage des Verständnisses der Wahrnehmung
Die Welt ist uns durch unsere Sinne zugänglich. Im Straßenverkehr beispielsweise hilft uns das Verständnis unserer Wahrnehmung beim Einschätzen von Gefahren. Bei Computern verhält es sich anders: Sie haben kein Verständnis von Straßen oder dem Verhalten von Verkehrsteilnehmern. Damit automatisiertes Fahren funktionieren kann, brauchen auch Computer eine Form der visuellen Wahrnehmung. Diese wird durch in Autos verbauten Kameras ermöglicht. Deren Bilder werden durch Methoden des „maschinellen Sehens“ oder „Computer Vision“ ausgewertet. Computer Vision ist ein interdisziplinäres Arbeitsgebiet, das darauf abzielt, mit Bild-Analyse-Algorithmen auf einer Recheneinheit, also einem Computer, ein visuelles Verständnis der Umgebung zu entwickeln. Um dies zu erreichen, gehören zur Bildverarbeitung Verfahren zum Erfassen, Verarbeiten, Analysieren und damit letztlich zum Verstehen digitaler Bild- und Videodaten. Denn die visuelle Erfassung des Umfelds allein reicht nicht aus:


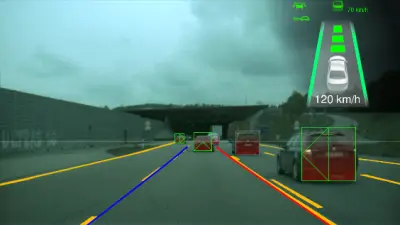
Zur Bilderfassung hinzu kommt die künstliche Intelligenz, die das Gesehene verarbeiten und bewerten muss – den Mechanismen in unserem Gehirn nicht unähnlich. Durch die Fortschritte im Bereich der künstlichen Intelligenz konnte die Leistung von Computer Vision Systemen schon deutlich verbessert werden. So sind solche Systeme heute bereits in der Lage, die in der Objekterkennung aufgenommenen Bildinhalte in sinnvolle Elemente wie Straßen, Autos oder Fußgänger zu unterteilen.
Um aber die Leistung des menschlichen Gehirns zu erreichen, benötigt Computer Vision noch eine weitere Fähigkeit: nämlich aus der wahrgenommenen Situation auch Vorhersagen über potentielle Gefahrensituationen zu treffen. Aus diesem Grund lautet eine der zentralen Fragen: Wie kann Computer Vision eine menschenähnliche Leistung bei der Umfeldwahrnehmung und Aktionsvorhersage erreichen?
Schritt für Schritt zum Einsatz in der Serienproduktion
Soll eine technisch nutzbare Umfeldwahrnehmung realisiert werden, so sind Zuverlässigkeit und Sicherheit der eingebundenen Systeme eine wesentliche Voraussetzung. Daher wird in einem starken internationalen Forschungsnetzwerk und mit rund 120 Bosch Forschern und Entwicklern am zentralen Standort für Computer Vision in Hildesheim an eben diesen Themen gearbeitet. Hierbei stehen drei Forschungsfelder im Fokus der Arbeit: Modellbasierte Multiview-Szenenanalyse, das heißt „klassisches“ Computer Vision, datengetriebenes „Deep Learning Computer Vision“ und das Computer Vision Systemdesign. Hier werden Algorithmen aus modell- und datengetriebenen Ansätzen zu robusten Computer Vision Gesamtsystemen integriert. Für das Training von Deep-Learning-Verfahren sind große Datenmengen erforderlich. So steht auch die Erforschung neuer Möglichkeiten im Fokus, die Trainings- und Validierungsdaten mittels Simulation und Bildsynthese automatisch zu generieren. Auf diese Weise können sehr realistische Situationen virtuell getestet werden, die dem System anschließend als Trainingsgrundlage dienen.
Die Forschungsergebnisse lassen sich zudem in andere Gebiete übertragen. Hierbei spielen neben dem Automotive Bereich vor allem die Anwendungsdomänen der Sicherheitstechnik und Robotik eine entscheidende Rolle.
Im Bereich der Sicherheitstechnik arbeitet die Bosch Forschung daran, Lösungen zur Analyse von Videoinhalten in sicherheitskritischen Bereichen zu finden.

Speziell dort, wo Multikamera-Netzwerke zum Einsatz kommen – wie zur Überwachung und Kontrolle von Bahnhöfen oder Flughäfen – können diese Technologien einen großen Nutzen bieten. So helfen beispielsweise Algorithmen bei der frühzeitigen Erkennung von Gewaltsituationen oder bei der Wiedererkennung von Personen innerhalb des Kameranetzwerkes. Dies ermöglicht nicht nur ein schnelles und zielgerichtetes Eingreifen der Sicherheitskräfte in Gefahrensituationen, sondern auch das Auffinden von Personen. Wer hat den herrenlosen Koffer am Flughafen abgestellt? Im aufgezeichneten Datenmaterial kann der Abstellzeitpunkt des Koffers gesucht und so die Person ermittelt werden. Gewaltprävention und das Auffinden von Personen: Zwei Beispiele, die zeigen, wie durch Personenerkennung in großen Kameranetzwerken die Sicherheit erhöht werden kann.
Die Sicherheit, aber auch die Lebensqualität erhöhen – egal ob bei der Arbeit, im Auto oder zu Hause. Dazu werden bei Bosch Technologien erforscht, die in vielfältigenen Anwendungsgebieten der Robotik das entsprechende Potenzial besitzen. Computer Vision Systeme spielen hierbei sowohl bei der robusten Wahrnehmung und dem semantischen Verstehen der Umgebung als auch bei der zuverlässigen Navigation eine entscheidende Rolle. Durch Fortschritte in diesen Bereichen können zukünftige Robotikprodukte intelligent und sicher im menschlichen Umfeld agieren.
Automotive ist ein Hauptanwendungsbereich der Bosch Forschung in Hildesheim. Hier geht es darum, videobasiertes automatisiertes Fahren und die damit verbundenen Herausforderungen zu lösen. Die Bosch Forschung entwickelt derzeit bereits Algorithmen für die nächste Generation der Multi Purpose Camera, damit Computer das Umfeld noch besser wahrnehmen können. Für die Realisierung von höherwertigen automatischen Fahrzeugfunktionen, wie zum Beispiel automatischen Überholmanövern, ist eine zuverlässige Wahrnehmung der gesamten Fahrzeugumgebung zwingend erforderlich. Ähnlich wie beim Schulterblick oder dem Blick in den Rückspiegel werden Multi-Kamera-Systeme entwickelt, die das gesamte Fahrzeugumfeld erfassen und so stets wissen, welche Manöver komfortabel und sicher möglich sind. Hinzu kommt eine videobasierte Lösung zur zuverlässigen und genauen Lokalisierung eines Fahrzeugs, die sogenannte „Video Road Signature“. Ein weiteres wichtiges Arbeitsgebiet basiert auf der Video-Innenraumsensorik von Fahrzeugen, um zum Beispiel das Wohlbefinden und die Sicherheit aller Fahrzeuginsassen zu gewährleisten.
Allein durch diese ausgewählten Anwendungsbereiche wird bereits klar: Die Arbeit im Bereich Computer Vision ist kein akademisches Forschungsvorhaben – sondern vielmehr ein interdisziplinäres Arbeitsgebiet, mit einer Vielzahl von Anwendungen in aktuellen und zukünftigen Bosch Produkten.
Mit allen Sinnen
Die Einführung von Serienprodukten in sicherheitskritischen Anwendungen ist immer mit Herausforderungen verbunden. Dazu werden höchste Anforderungen an die Leistungsfähigkeit und Zuverlässigkeit der in der Bosch Forschung entwickelten Algorithmen und Systeme gestellt, denn an der Schwelle zum autonomen Fahren ist und bleibt die Sicherheit aller Verkehrsteilnehmer das wichtigste Ziel. Verbesserte Algorithmen und neue Technologien wie ein Rundum-Blick um das Fahrzeug oder eine multimodale Sensordatenfusion lassen sich bereits heute in Assistenzsysteme einbinden, um den Fahrer zu unterstützen. Die hierzu entwickelten Lösungen bieten auch anderen Forschungsbereichen eine gute Grundlage, existierende Herausforderungen auf neue Art und Weise zu lösen. So soll nicht nur die Zahl der Verkehrsopfer sinken – sondern die Zahl der Personen weiterhin steigen, deren Leben durch neue Technologien im Alltag erleichtert wird.