The FMI Layered Standard for Network Communication: Enabling collaborative simulation of networked systems
Bosch Research Blog | Posted by Christian Bertsch, 2025-08-01


Have you ever looked under your car's hood and counted its “little computers”? You might find anywhere from 30 to 150 of them. These “Electronic Control Units,” or ECUs, enable countless tasks, from engine control to braking functions. All of these ECUs are interconnected with sensors and actuators, forming a complex network of wires that can stretch for kilometers.
Unlike a home computer that connects to the internet and other devices using Ethernet or wireless communication like Wi-Fi and Bluetooth, the automotive world demands exceptional safety and reliability. Over time, these stringent requirements have led to the development of different communication protocols for safety-critical systems. One of the earliest and most successful is the Controller Area Network bus (CAN bus), developed by Bosch in the 1980s. Today, several other protocols like FlexRay, LIN, and Automotive Ethernet exist alongside CAN to serve different use cases.
ECUs and their software are often sourced from various suppliers or the vehicle manufacturer directly. This diversity presents a challenge: How can the complex interplay between these systems be developed and tested efficiently? Prototyping every possible combination is an immensely time-consuming and costly process.

Simulation of Electronic Control Units
Virtualization and simulation offer a solution to these challenges. Rather than building physical prototypes, engineers can develop digital models of ECUs and evaluate their behavior on computing platforms. A critical aspect of this approach is simulating network communication to ensure accurate data transfer between ECUs and to detect potential faults that could compromise vehicle safety.
A major obstacle, however, is the poor interoperability between different software and simulation tools. The tools required to build virtual ECUs and model their network communication have traditionally been incompatible with one another. As a result, effective collaboration between organizations has been difficult, if not impossible.
FMI extended for the simulation of Network Communication
The Functional Mock-up Interface (FMI) addresses this issue. As highlighted in our article FMI 3.0 – The next generation exchange format for system simulation beyond tool borders, FMI serves as the leading standard for tool-agnostic model exchange and co-simulation at the system level. Adherence to this standard allows diverse ECU models to be developed and then simulated using a range of different simulation environments.
But until recently, a crucial element was missing: a standardized method for incorporating network communication into FMI-based simulations. While powerful, the FMI standard is intentionally generic to support diverse applications in fields like automotive, manufacturing, and aerospace. It provides fundamental data types but deliberately excludes application-specific details, as including them would make the core specification unmanageable.
To overcome this limitation, the concept of “Layered Standards” was created, extending the core FMI standard to meet the specific needs of specialized applications, such as simulating automotive network communication. This approach builds upon the existing FMI foundation while providing the necessary extensions for specific domains.
Bosch Research partnered with other Bosch divisions to incorporate their expertise and requirements into this emerging standard. This collaborative effort involved active participation in the development and prototyping phases. The results were presented by the FMI Project at the International ASAM Conference 2024 and are available to view on YouTube.
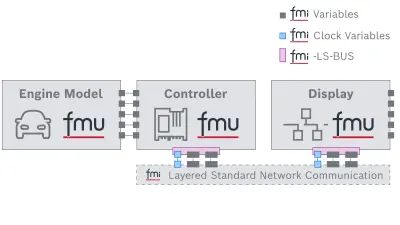
The resulting “FMI Layered Standard for Network Communication (FMI-LS-BUS)” enables two main use cases:
- Physical Signal Abstraction (or High-Cut) allows the simple transport of physical signal values between virtual ECUs. The network properties are largely idealized, including infinite bandwidth and zero-dela. Signals, groups of signals and their properties (e.g., units) are usually derived from existing and validated standard network topology description formats, such as DBC, LDF, Fibex and ARXML.
- Network Abstraction (or Low-Cut) enables the realization of virtualized bus driver implementations. This transport layer emulation enables simulations that range from idealized to highly detailed, accounting for bandwidth restrictions, message arbitration, and delays. It forwards the network payloads using binary variables. The Low-Cut Abstraction layer allows for virtualized bus driver implementations, including feedback from the physical drivers about transmission status or network node states. Since it is protocol-independent, the Network Abstraction layer can also be used to simulate non-automotive control units, for instance in industrial automation.
The FMI Project has now reached a significant milestone by releasing the first version of the FMI Layered Standard for Network Communication. The initial release features support for the CAN protocol. Development to support other protocols, including Ethernet and FlexRay, is already underway.
What are your thoughts on this topic?
Please feel free to share them or to contact me directly.

Author: Christian Bertsch
Christian Bertsch is a senior project manager at Bosch Research.
He studied mathematics and physics at the University of Heidelberg, Germany, focusing on numerics. Bertsch began his career at Bosch in 2001 as a simulation engineer. Since 2004, he has led projects for Bosch Research in the fields of system simulation, advanced model-based functions and algorithms for embedded software, cloud applications, and dynamical digital twins.
Within the Bosch Group, he coordinates the usage of FMI and represents Bosch in the FMI Project, serving as its leader since 2022.
Further information
The Functional Mock-up Interface (FMI) is the leading tool-independent open standard for exchanging and co-simulating models that have been created in different simulation tools. Such models can describe the dynamic behavior of a single component, such as an electrical machine, or an entire system like a battery-electric vehicle. They can also be used for virtualized design and testing.
The FMI standard is developed in a project with the Modelica Association by a consortium of about 50 member companies (tool vendors and users) and research institutions, with members including Airbus, Bosch, NVIDIA, Renault, Volkswagen and many more.
At Bosch, FMI is used heavily for both internal work and partner collaborations. Bosch Research actively contributes to the standard's development, ensuring it meets Bosch’s future needs in autonomous driving and electrification. Specifically, we work to ensure FMI can be used efficiently for physics-based, data-driven, and hybrid models, as well as for software in the form of virtual Electronic Control Units.
