A quarter of a century of ACC adaptive cruise control
Interview with Bosch engineer Bernhard Lucas


Concealed under the bodywork of modern vehicles are numerous helpers: driver assistance systems that make driving safer and more comfortable. They help mitigate the consequences of accidents or even prevent them altogether, provide support in certain driving situations, or take over certain tasks independently.
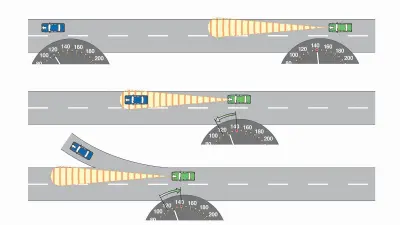
In 2000, Bosch set a new standard when it launched the radar-based ACC adaptive cruise control system. The system recognizes vehicles in front, determines their speed, and maintains the desired distance by braking and accelerating. This considerably eases the burden on drivers, especially on freeways and expressways.
When Bosch set up its radar development division in 1995, Bernhard Lucas was one of the first to join. For the next 24 years, he worked exclusively on Bosch radar and played a key role in its development. The first radar-based system went into production in 2000, bringing a long phase of ups and downs to an end and laying the foundations for a great success story.
In this interview, Bernhard Lucas recalls how that story began.

How did Bosch get involved with radar?
Radar first came on the scene in the 1970s. You have to remember that with radar, the lower the frequency, the easier it is to handle; however, the antennas get bigger and bigger, so it wasn’t really suitable for cars. Things really got going with the Prometheus project, in which we researched a wide variety of systems, including parking assistants, ultrasonic sensors, and ACC.
The Prometheus project
The Prometheus project was a major European research initiative that ran from 1986 to 1994. It aimed to improve the efficiency, environmental compatibility, and safety of road traffic. Participants included vehicle manufacturers, suppliers, electronics companies, and scientific institutes.
Did you have a firm idea right from the start of how the system would work?
Originally, it was only intended to be a collision warning system. Then it was to be a pure following mode, or “lock-on target” system: your car locks on to the vehicle in front and you drive behind it. Once the car in front was gone, the system switched off too. No one thought it would be possible for the system to understand that there were different lanes, that it could work out what vehicle to follow, especially on bends. After all, the radar looks straight ahead, and there were no cameras in cars back then. And no one imagined that angle resolution would be possible. Measuring distance and speed is relatively easy, but measuring lateral positions like left, right, or center is complicated. Then as now, it’s called the angle estimation method, but of course it’s based on algorithms.
And then the development work began?
Yes, initially we wanted to build the system using components developed externally, but the supplier was unable to deliver the quality and the quantities we wanted. At the same time, Bosch was already considering manufacturing the radar transceiver in-house, and the transceiver did in fact go into production in Backnang, near Stuttgart, in what was then the Communications Technology business sector.
How did the road tests go?
There were setbacks, of course. We were worried about problems from neighboring lanes. If you were using ACC in the left lane and there was no vehicle ahead of you, it could happen that you were slowed down by vehicles on the right. This isn’t particularly dangerous — deceleration is limited in ACC so that it doesn’t go into the safety-critical range — but it’s very annoying for the driver. The main difficulty was defining the correct angle, mostly due to something called multipath propagation. An example of this is guardrail reflections; guardrails, especially high ones, act like a mirror for the radar. When the radar beam bounces off the guardrail, the system thinks the beam is coming from this direction and activates the brakes. Surprisingly, concrete reflects the beam as well.
These were presumably not the only issues.
The special cases we discovered as we were developing the emergency braking systems were just crazy. You can do a lot with simulations, but we covered thousands of kilometers with test drivers and found a lot of points of interest. For example, some underground parking garages have entrances where the road dips suddenly, so at the moment of entry all you can see is the garage ceiling. Also, the radar can confuse some metal signs for vehicles, or even discarded soda cans at the side of the road — they’re the best reflectors.
How did you manage to get the system to recognize these as harmless and not react to them?
We tackled them one by one and found work-arounds. For instance, for the entrance to the underground parking garage, you can introduce height estimates. Certain things can also be recognized from radar signals; for example, are obstacles flat or raised? In the case of a raised object, there’s the direct propagation path of the radar beams and the path over the ground. With a flat object such as a manhole cover, there’s no ground path. This can be used to distinguish manhole covers from vehicles.

Ultimately, however, nothing stood in the way of the start of production.
True, but it was tough going for a while. The first generation had high manufacturing costs and small batch sizes. We were able to bring down the costs of the second generation significantly, but we only had a few customers. And what happened next? The third generation. We succeeded in switching from expensive components such as gallium arsenide to more or less conventional silicon wafers. The combination of component expertise and system know-how really was the recipe for success. It took 13 years for us to manufacture the first million radars, and then another 13 months for the second million. And just recently we celebrated our one hundred millionth. That’s incredible!

Author: Bettina Simon