Cooperative Driving of Automated Vehicles with V2X Technology
Bosch Research Blog | Posted by Frank Hofmann, 2022-10-19


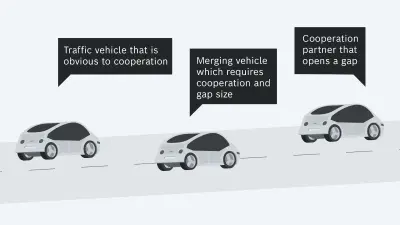
Drivers have developed a cooperative driving style over decades to achieve safety and efficiency in traffic. For example, humans accelerate or brake slightly to create a gap that will allow other motorists to change lanes. Generally speaking, cooperative driving refers to road traffic behavior in which motorists cooperatively plan and execute driving maneuvers. This can be seen as a multi-agent system whereby traffic participants try to reach a common goal collectively. For automated vehicles, we typically talk about the Sense-Plan-Act concept, which needs the support of communication technologies to be realized in a cooperative manner. V2X (Vehicle-to-everything communication) can thus become an important enabler for automated vehicles. The risk of automated vehicles becoming selfish and hindering steady traffic flow by optimizing only their own costs and driving too carefully can be prevented with the right measures. Especially for automated vehicles, there are ways of avoiding misunderstandings and ambiguities in maneuver coordination.
Three core technologies are needed to achieve our goal of cooperative driving: collective perception, maneuver coordination and reliable communication technologies.
Collective perception extends the view of the vehicle beyond the vehicle’s sensor perception. Information about objects such as vehicles or pedestrians recognized by other vehicles, or road infrastructure components, are transmitted to surrounding vehicles. This enhances the environmental models of all vehicles. The development has already achieved a high degree of maturity and standardization at ETSI under the term Collective Perception Service (CPS).
Maneuver coordination requires a flexible concept leading to a solution that can be used in all traffic situations. Based on V2X messages, different types of trajectories (reference, alternatives, and request), each of which is accompanied by a cost value, are exchanged. The driving intention of a vehicle is coded in the reference trajectory describing its current plan without cooperation. In addition, cooperation offers are communicated as alternative trajectories with probably higher costs for the ego-vehicle, but lower costs for the traffic overall. In response, the other vehicle provides a request trajectory which takes the offers into account. This mechanism is well defined but is still in the early stages at ETSI under the term Maneuver Coordination Service (MCS).
Communication technologies build the basis for reliable information exchange between vehicles. The message definition of CPS and MCS is part of the upper OSI layers. But the lower OSI layers also face many challenges, especially as communication traffic control in a distributed system, to avoid overloading the capacity of the transmission channel. Depending on the world region, both technologies, ITS-G5 based on the IEEE 802.11p standard and LTE-V2X according to 3GPP Release 14 are in the deployment phase. 5G-V2X according to 3GPP Release 16 specifies new features relevant for maneuver coordination. Research has started shifting to 6G where Integrated Communication and Sensing will be one main pillar. This may open the door to combining collective perception and message exchange within one system. But there is still a lot of exciting research to be done.
Cooperative driving means not only cooperation between traffic participants, but also good cooperation between research institutes, universities, and several companies in the value chain for comprehensive development. The public funded project IMAGiNE enabled the first steps.
I would also like to say a big thank you to the Bosch research team performing this excellent work.

Loading the video requires your consent. If you agree by clicking on the Play icon, the video will load and data will be transmitted to Google as well as information will be accessed and stored by Google on your device. Google may be able to link these data or information with existing data.
What are your thoughts on this topic?
Please feel free to share them or to contact me directly.

Author: Frank Hofmann
Frank Hofmann is a chief expert at Corporate Research at Robert Bosch GmbH in Hildesheim, Germany. In this role, he is responsible for strategy in research for communication systems. In addition, he leads a research group specializing in different communication and localization topics. He is also active in several consortia, e.g., 5G Automotive Association, Car2Car Communication Consortium and leads the consortium of the public-funded project 5G NetMobil. He holds a Diploma in electrical engineering from the Karlsruhe Institute of Technology (KIT) and received his Ph.D. from the University of Hanover. In the course of his career, he has been involved in the RF and baseband receiver, ASIC development of DAB (Digital Audio Broadcasting) and Galileo, as well as in the system design and standardization of DRM (Digital Radio Mondiale). His current main interest comprises all wireless communication systems with the emphasis on vehicle-to-x communication.
Further Information
The following resource provides a more in-depth understanding of Cooperative Driving and its application for use cases of interest to Bosch.
Publication


