Move to see: How remote sensing algorithms improve automotive radar
Bosch Research Blog | Posted by Gor Hakobyan and Johannes Fink, 2022-08-16



The figure above shows an image of the Moon’s surface. It is a “normal” photo. Radar technology allows to capture detailed images of the Moon from the Earth’s surface — like the one displayed here at the US “National Air and Space Museum” website. This image is obtained by exploiting the Earth’s rotation, such that measurements at different locations are synthesized into a large synthetic antenna aperture, allowing high-resolution microwave imaging. This principle is known as synthetic aperture radar (SAR).
Radar plays an important role not only in remote sensing, but also as a core sensing modality for automated driving. Radar is essential for robust all-weather driving functionality, as it does not depend on outer illuminators and can “see” through rain, fog, and snow. The fundamental limitation of radar as compared to optical sensors (cameras, LiDAR) is its angular resolution. For high resolution radar imaging, a large antenna aperture is needed. Given the limited installation space in a car, this results in a fundamental trade-off between the radar resolution and its aperture size.
At Bosch Research, we combined advanced algorithms from remote sensing with automotive expertise to produce an imaging radar that is no larger than existing products and achieves resolutions previously impossible in this form factor.
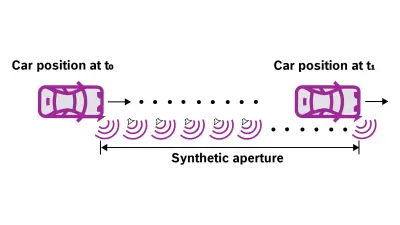
SAR obtains fine angular resolution by synthesizing a large antenna aperture based on the sensor motion. Given the sensor locations, consecutive radar measurements can be processed as if they were acquired by a single large antenna array. This principle is illustrated in the figure above.
The car's motion results in a synthetic aperture along its trajectory, which may even be larger than the car itself. The SAR-processing improves the angular resolution by an order of magnitude over that of the physical aperture. Improving the horizontal resolution of the sensor with SAR processing frees up physical antennas for enhancing the vertical resolution.
SAR processing, however, needs sub-millimeter accurate trajectory information. Such precise information is hard to acquire using odometry sensors. We’ve overcome this problem by extracting odometry information from the radar data itself using advanced trajectory estimation algorithms. This not only achieves significantly higher precision, but also enables self-sufficient operation for the radar sensor.
Possible new applications of synthetic aperture radar
High resolution SAR images are useful in various functions in cars beyond today’s adaptive cruise control and automatic emergency braking. Possible new applications include parking-space detection as well as a multitude of warning, braking, and steering assist functions that require detailed contour information. A further application is radar-based localization and mapping based on accurate high-resolution radar maps of the environment.
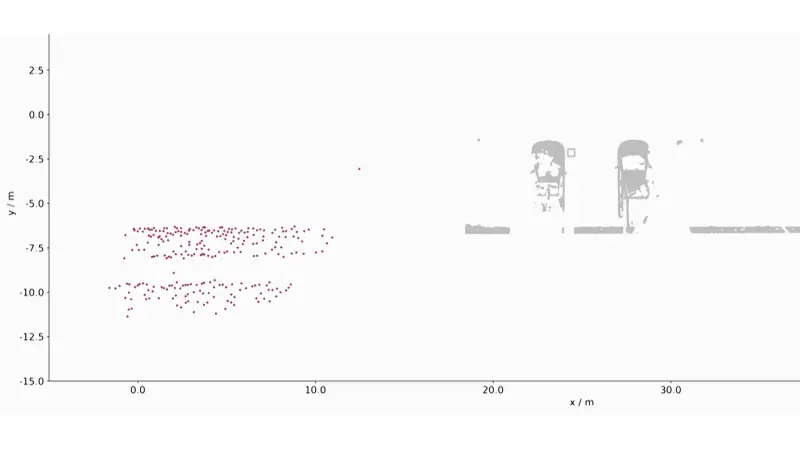
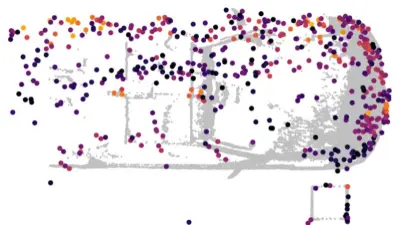
The figure below shows parked cars measured with SAR (large dots) compared to a ground-truth reference obtained from a high-precision laser scanner (gray shading). Clearly, with SAR, even small details such as a trailer coupling or the exact location of the curbstone, are resolved.

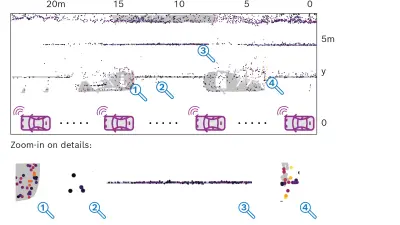



By precisely measuring the contours of parked cars and obstacles, it is possible to identify usable parking spaces that match one's own vehicle. Once a suitable spot is found, the car can safely park by itself, continuously updating the contours and scanning for obstacles. Advantages compared to state-of-the-art ultrasound solutions are a larger scanning range and better elevation capability, which allows height estimation of surrounding objects. Height information is important for avoiding small obstacles like bobby-cars or deciding whether a curbstone can be driven over or not.
In addition to precise contours, our SAR algorithms also deliver accurate ego-trajectory information based on the radar measurements. This effectively makes the radar into a valuable odometry sensor.
Combining highly accurate odometry and contour detection allows for accurate localization and mapping of the surroundings. Unlike infrastructure-based methods such as GNSS, this scene-based localization with radar is self-reliant. Additionally, GNSS-independent localization such as this is crucial in areas with poor satellite coverage like tunnels and urban canyons.
SAR imaging brings radar sensing one step closer to LiDAR based on a standard radar sensor, which costs a fraction of a LiDAR. Advanced processing algorithms obtain highly accurate images of the car’s surroundings as well as odometry from radar data alone. As the real antenna aperture of a SAR-sensor may be small, such a sensor can fit virtually anywhere, even in the tight fittings of today’s cars.
SAR improves automotive radar’s imaging capabilities and helps to close the gap towards LiDAR in terms of contour accuracy. Hence, SAR is a low-cost, high accuracy surround sensing modality that enriches the sensor suite of automated driving.
This work on automotive SAR is part of a Bosch Research project focusing on the development of imaging radars. The stakeholders and cooperation partners are distributed across Bosch business units such as Cross-Domain Computing Solutions (XC), working specifically on radar development and automated parking, as well as Automotive Electronics, focusing on the radar system-on-chip development. The work on SAR began in 2017. It is currently focusing on automotive and robotics applications.
What are your thoughts on this topic?
Please feel free to share them or to contact us directly.
Author 1

Johannes Fink
Johannes Fink obtained a Dipl. Ing. (M.Sc.) degree and Dr.-Ing. (Ph.D.) degree in electrical engineering and information technology at the Karlsruhe Institute of Technology, Karlsruhe, in 2011 and 2017, respectively. From 2011 to 2017 he was with the communication engineering lab at the Karlsruhe Institute of Technology. In 2017, he joined the signal processing group at Bosch Corporate Research and works in the fields of radar systems and signal processing. Since his first day at Bosch CR, Johannes has been committed to bringing synthetic aperture radar from remote sensing to automotive. His research interests include sensor signal processing, radar waveforms and radar system design for automotive and non-automotive applications.
Author 2

Gor Hakobyan
Gor Hakobyan is a research scientist and project lead at Bosch Research. He joined Bosch in 2014 as a PhD student in the field of radar signal processing. After completing his PhD with Bosch Research and the University of Stuttgart in 2017, he continued his research on automotive radar at Bosch Research. His research focuses on radar AI as well as signal processing and system design for high-performance automotive radars. His academic activities include holding a lecture on “Automotive radar systems for autonomous driving” at the University of Stuttgart.


