Rating the criticality of traffic situations for automated vehicles
Bosch Research Blog | Post by Patrick Schneider, 2021-12-06


Co-authors: Matthias Woehrle, Christian Heinzemann, Jens Oehlerking
Highly automated driving functions are developed with the promise of making traffic safer. As Bosch has a focus on technology for life, guaranteeing the safety of such automated driving functions is one of our key concerns. Thus, one particular research focus is their verification and validation. An important aspect with respect to safety of automated vehicles is rating how critical a traffic situation is from the perspective of a particular vehicle, which is addressed by threat metrics or criticality metrics.
Due to my interest in automated driving, I joined Bosch Research for my research thesis on criticality metrics on highways. After this great experience, I decided to also write my master’s thesis at Bosch Research to extend my previous work towards more challenging urban scenarios. Both works were performed in close collaboration with an internal project activity.
Evaluating the criticality of traffic situations
In my research thesis, I evaluated different threat metrics for highway functions. Threat metrics provide a measure on how critical a traffic situation is from the perspective of one particular vehicle. Computing such a metric always involves capturing an expectation or assumption on the future behavior of other traffic participants in a model that is then used for computation. In my thesis, I used the highD dataset as a basis, which contains driving data of human drivers on German highways. I focused on two concrete scenario classes and evaluated threat metrics for these on human drivers. In particular, I investigated cut-in maneuvers and hard braking maneuvers of a preceding vehicle. The results show that
- the various threat metrics in my study greatly differ in their prediction capability across different scenario classes, i.e., the behavior of human drivers is more predictable in some situations than in others.
- human drivers frequently caused traffic situations that are rated as critical under the investigated metrics.
While I studied criticality based on data from human drivers, criticality is also an important aspect for checking automated driving function that need to be able to recognize and resolve such critical situations. A good summary of the main points of the thesis can be found in the corresponding workshop paper: “Scenario-based threat metric evaluation based on the highD dataset” which was presented at the IV’21 Workshop on “Naturalistic Road User Data and its Applications for Automated Driving”.
After focusing purely on the data side in analyzing highD, I was interested in also working on the topic from a modeling perspective to gain a deeper understanding of the analyzed traffic situations. As such, for my master thesis, we identified a suitable topic regarding the analysis of an urban intersection based on the inD dataset using the recently published SOCA method from Bosch Research. Background on the SOCA method can be found in the paper” SOCA: Domain Analysis for Highly Automated Driving Systems” published at ITSC 2020.
In my master’s thesis, I focused on a detailed analysis of an intersection and built and validated models, e.g., of the map as well as the relevant traffic participants.
The results of my thesis show that building suitable models for both pedestrians and cars that enable a meaningful computation of criticality is much more relevant in urban situations than for highway situations.
This is particularly caused by intersecting traffic flows, higher degrees of freedom for the traffic participants (e.g., pedestrians and cyclists not sticking to lanes), and more complex road infrastructure (e.g., unclear driving lanes and missing lane markings).
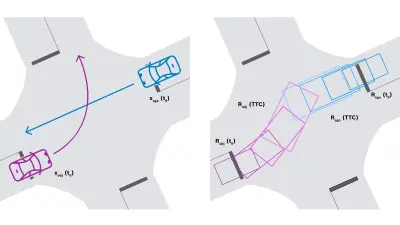
Right: Mathematical model based on reachable sets for predicting possible future locations of the vehicles and for calculating the criticality.
Based on the results of my thesis, my supervisors from Bosch Research and I jointly wrote the paper “Towards threat metric evaluation in complex urban scenarios” published at ITSC 2021, which provides an overview of the general approach, yet focusses particularly on the analysis of interacting vehicles. The paper discusses the challenges of integrating map models and intention of traffic participants into models for threat metrics. We could identify that a major challenge for these models in urban scenarios is a trade-off between worst-case behavior (e.g., oncoming traffic could swerve into the vehicle’s lane at any time) and reasonably expectable yet challenging behavior (e.g., hard braking of other vehicle within the lane).
Outlook
We are excited about the results and strive towards integrating the key findings of these works into our overall V&V approach based on the SOCA framework. We hope that sharing these insights with the scientific community also helps to accelerate the progress in V&V of automated driving functions in general.
Finding your place at Bosch Corporate Research as a student
Some of my personal highlights of working at Bosch Research were the opportunity to publish my work at international workshops and conferences and the great collaboration within the team, but also with several other researchers from different departments.
Are you interested in working on exciting topics at Bosch Corporate Research with us? Design the future with us! Apply now.
Profile

Author: Patrick Schneider
Patrick Schneider studied Electromobility with a focus on autonomous and connected driving at the University of Stuttgart. He completed a research thesis and his Master’s thesis at Bosch Research in the field of verification and validation methods for highly automated driving by using real driving data and threat metrics. After his graduation, he continued working at Bosch as a system engineer for functional safety to further pursue his goal of making mobility safer.
Co-authors: Matthias Woehrle, Christian Heinzemann, Jens Oehlerking