Make motion control functions even safer
Bosch Research Blog | Posted by Tobias Ritz, Felix Berkel, Kim Peter Wabersich, Stefan Grodde and Thomas Specker, 2023-04-26


To ensure safe control functions for vehicle guidance and navigation, it is key to develop methods that incorporate and satisfy safety-related system constraints as early as the development process. We implemented two concepts for safe path tracking, and verified the performance on a modular vehicle platform.
Bosch products enjoy a high reputation when it comes to safety-critical control applications. For example, ABS, ESP, and advanced driver assistance systems help reduce and prevent fatal accidents. To ensure this remains the case in the future, too, we are constantly improving our development methods. This is also important because systems are becoming increasingly complex and their software content is rising.
So the question is: How can we make these sophisticated control functions for vehicle guidance and navigation even safer? We need to develop methods that incorporate and satisfy safety-related system constraints, already during the design phase of the development process. In this blog post, we would like to present two concepts for safe path tracking whose performance we have verified on a modular vehicle platform.
The concepts help us handle safety-critical dynamic systems where system constraints must be satisfied at all times. A descriptive example is motion control in highly automated or autonomous driving. The task is to track a given path provided by a planning layer while staying within the given road boundaries.
Today's motion control systems are based on classical methods of control engineering. They have two main disadvantages:
1) They control functions (actuators) such as braking, accelerating, and steering independently. However, due to the physical interactions in vehicle dynamics, a holistic view on all domains is essential. This is the only way to stabilize the vehicle and ensure safety in demanding and highly dynamic scenarios such as evasive maneuvers.
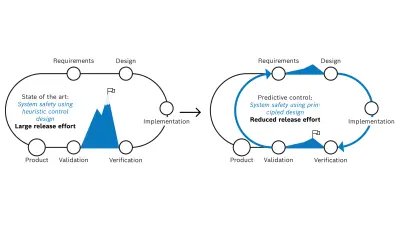
2) They take no account of system constraints such as roadway boundaries in the initial design phase. Instead, test engineers use heuristic tuning to ensure safety-critical constraints are met. As a result, the release processes are very complex and expensive.
Concept One: Model predictive control
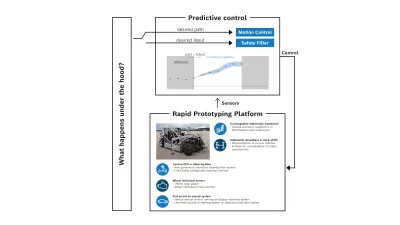
In addition to these classical motion control structures, model predictive control (MPC) has become established with great success in recent decades. It is now considered the primary control method for systematically handling system constraints in various applications, including motion control. The basic idea is to formulate a desired motion controller, including all safety constraints, as an optimization problem. Within this problem, the future behavior of the vehicle is predicted over a finite horizon. The starting point is the vehicle state measurement. Based on the prediction, the optimal input sequence is computed, and the first element is applied to the vehicle. In this way, safety can be taken into account at the design stage already. This significantly reduces the testing effort required for release.
In the following, the effectiveness of MPC for motion control is demonstrated on the MockUp vehicle. The MockUp is a research vehicle and a platform for integrating innovative mechatronic systems and vehicle motion control concepts. The electric vehicle serves as a rapid prototyping platform with full control of all actuators. This also includes a newly developed steer-by-wire system and wheel-individual actuation through electric motors.
MPC enables challenging tasks. The method empowers path-tracking in scenarios with high lateral accelerations. This includes evasive maneuvers where the vehicle has to steer, accelerate, and brake at the same time. In the subsequent video, this is exemplified by a figure-of-eight maneuver with lateral accelerations of up to 9 m/s².

Loading the video requires your consent. If you agree by clicking on the Play icon, the video will load and data will be transmitted to Google as well as information will be accessed and stored by Google on your device. Google may be able to link these data or information with existing data.
MPC thus allows synthesizing motion controllers with pre-defined characteristics. In summary, MPC overcomes the drawbacks of classical control approaches and paves the way to a safe, high performing and efficiently certifiable motion control.
Concept two: Predictive safety filters
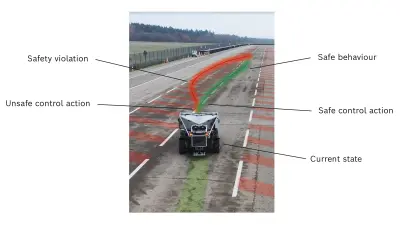
The second concept we would like to introduce is predictive safety filters. They use the same core algorithms as model predictive control with some modifications. These adaptions allow us to use the safety filters as a modular safety framework for any desired control signal. These signals include potentially unsafe control structures or even human driver inputs such as steering and braking. Unlike traditional control tasks, such as tracking a reference path, these filters have a predictive function – they assess whether desired control inputs may potentially lead to violations of constraint in the future. If there is a safety risk, the safety filter intervenes – it is entitled to modify desired input signals to the minimum extent necessary to ensure safety.
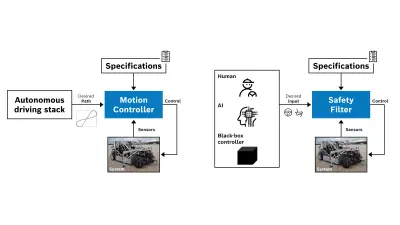
Due to their modularity, safety filters can be used in various applications. For example, they supervise human drivers in driver assistance systems or learning algorithms, such as in imitation or reinforcement learning. Similarly, they are used in black-box controllers that do not provide safety guarantees by design.
The use case we would like to present is the supervision of a human driver input. In this case, it is a steering command – alternating steering left and right. The video shows how the vehicle behaves when the predictive safety filters intervene in the steering. They have predicted a constraint violation and now ensure the vehicle stays safely inside the given road boundaries – in this case, driving straight.
Loading the video requires your consent. If you agree by clicking on the Play icon, the video will load and data will be transmitted to Google as well as information will be accessed and stored by Google on your device. Google may be able to link these data or information with existing data.
What are your thoughts on this topic?
Please feel free to share them or to contact us directly.
Author 1

Tobias Ritz
Tobias completed his bachelor's and master's degrees in electrical engineering with a focus on automation and control at the Technical University of Darmstadt and joined Bosch in 2018 as a research engineer for the development of innovative mechatronic systems. Since then, he has worked on the development of future steering systems and holistic vehicle motion control concepts, including failure tolerant control systems. His research interests include modern motion control theory and applying the developed concepts on the real system to evaluate the performance in real-world applications.
Author 2

Felix Berkel
After completing his Ph.D. degree in control engineering, Felix joined Bosch research in 2018 where he works on control of autonomous vehicles and electric drives. He specializes in model predictive control and is passionate about demonstrating its benefits for various applications. Another of his research interests is bringing machine learning methods to control engineering applications.
Author 3

Kim Peter Wabersich
Kim Wabersich obtained his bacherlor's and master's degrees in Engineering Cybernetics from the University of Stuttgart in Germany in 2015 and 2017, respectively. He completed his Ph.D. on predictive safety mechanisms at the Institute for Dynamic Systems and Control (IDSC) at ETH Zurich in 2021 and continued his work as a postdoctoral researcher until 2022. Since August 2022, he has worked at Bosch research on safety-critical control methods with applications in autonomous vehicles. His research interests include safe control methodologies and their intersections with safe reinforcement learning.
Author 4

Stefan Grodde
Stefan studied Electrical Engineering at the University of Erlangen-Nürnberg and joined Bosch in 2005. He developed engine-speed-based control functions in the business unit before moving to Bosch Corporate Research in 2011. Stefan is currently working on control functions for autonomous vehicles and fuel cells. His research interests are mobility concepts of the future and control methods for solving challenges in this field.
Author 5

Thomas Specker
Thomas is a senior expert for safe-by-design control systems at Robert Bosch GmbH Corporate Research in Renningen, Germany. He holds a diploma in electrical engineering from the University of Ulm, where he also earned his Ph.D. after a stint as a project engineer for robotics in automotive testing. During his career at Bosch, which began in 2015, he has been involved in several research projects dealing with the control of electromechanical actuators, waste heat recovery systems, electric drives, robotics and automated driving. In his current role as cross-divisional project manager, he is responsible for the development and industrialization of safe-by-design methods at Bosch.